第7章 二次元エコープラナー法
本章では,二次元グラジエントエコー法,二次元スピンエコー法と共に,基本的なパルスシーケンスである,二次元エコープラナー法(2D-EPI)について解説する.
EPIは,第5章と第6章で紹介したこれらの二つの手法に比べ,圧倒的に高速であるという利点を有しているが,逆に,高い空間分解能を実現する点では不利であることから,高速な撮像が不可欠である,functional MRIや,diffusion weighted MRI,Arterial spin labelingなどに活用されている.
EPIには,リフォーカスパルスを使用しない,いわゆるグラジエントエコータイプのEPI(GRE-EPI)と,リフォーカスパルスを使用する,スピンエコータイプのEPI(SE-EPI)がある.
GRE-EPIは,主に,functional MRIなどに使用され,SE-EPIは,主に,diffusion weighted MRIや,それを応用したTractographyなどに使用される.また,脳血流を計測するArterial spin labeling(ASL)などにも活用されている.
以下,まず,グラジエントエコータイプのEPIについて,Fig.7-1に示すシーケンスチャートと,Fig.7-3に示すソースコードによって説明する.
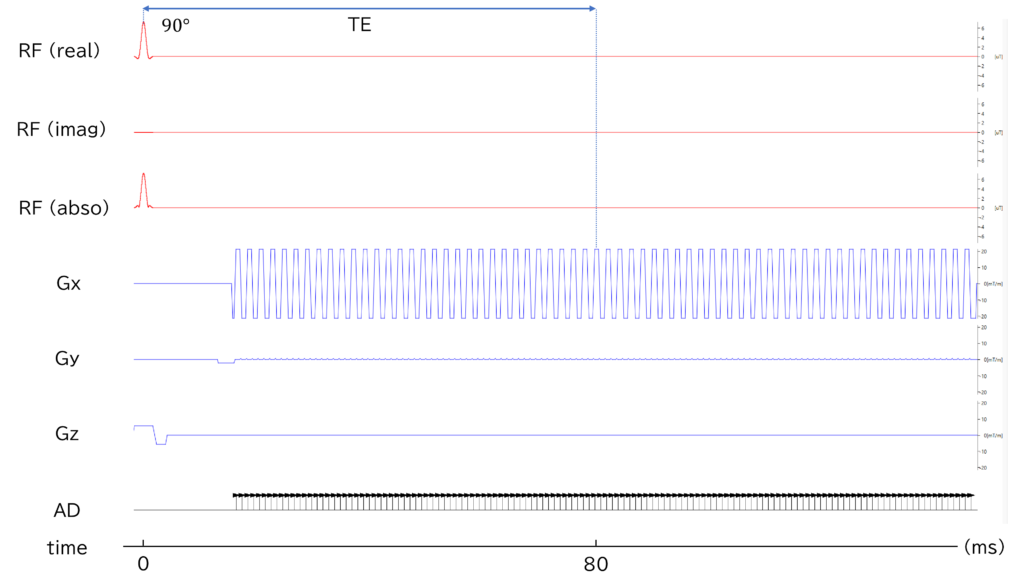
2DGRE-EPIでは,Fig.7-1に示すように,スライス面を励起した後に,上記のように,リードアウトグラジエントと,位相エンコードグラジエントを印加する.この1回のシーケンスで,二次元面内のk空間の信号を一挙に計測する.このシーケンスでは,リードアウトグラジエントの反転回数は128回であり,一つの極性のリードアウトグラジエントで,128点の信号サンプリングを行うので,合計した信号サンプリング点数は,128×128個であり,この信号をFFTすることにより,二次元画像(128×128画素)(Fig.7-4)が撮像できる.
EPIでは,リードアウトグラジエントと,位相エンコードグラジエントに,特別な工夫がなされてるので,それをFig.7-2を用いて詳述する.
リードアウトグラジエントは,Fig.7-2に示すように,Echo spacingという時間間隔で,連続的に反転するグラジエントで,次々にグラジエントエコーが発生するように設計されている.また,MR信号は,通常,リードアウトグラジエントが平坦になった部分でサンプリングを行う(リードアウトグラジエントが変化する部分でサンプリングを行う手法も存在するが,データの補正などが必要).
位相エンコードグラジエントは,リードアウトグラジエントが変化する間に,Fig.7-2に示すように加える.このグラジエントの形状には,特に制限はなく,積分した強度(図に示した面積)が,位相エンコードに沿ったk空間のラインを1本だけ進める大きさであれば良い.ただし,二次元のk空間の原点の時刻によって,エコータイムTEが決定されるため,位相エンコードグラジエントには,最初に,負の台形状のグラジエントを印加しておく.すなわち,三角形の位相エンコードグラジエントの合計の面積が,その負の台形状の面積と等しくなった直後の信号サンプリングの時刻が,TEとなる.
Fig.7-1に示したシーケンスでは,Echo spacingは1ms,echo train length(ETL)は128,信号サンプリングのdwell_timeは5μs(pixel bandwidthは,1562.5Hz),リードアウトグラジエントの反転時間は0.36ms,TEは80msとしている.
このパルスシーケンス(FOVは220mm)では,リードアウトグラジエントの強度は±21.35mT/mであり,スイッチング時間は0.36msであるため,グラジエント強度の変化率は,21.35mT/m/0.18ms = 118.6mT/m/msである.よって,少なくとも120mT/m/msのスルーレートを有するグラジエント系の性能が必要である.このスルーレートは,最近のMRI装置では,ほぼ実現されている.
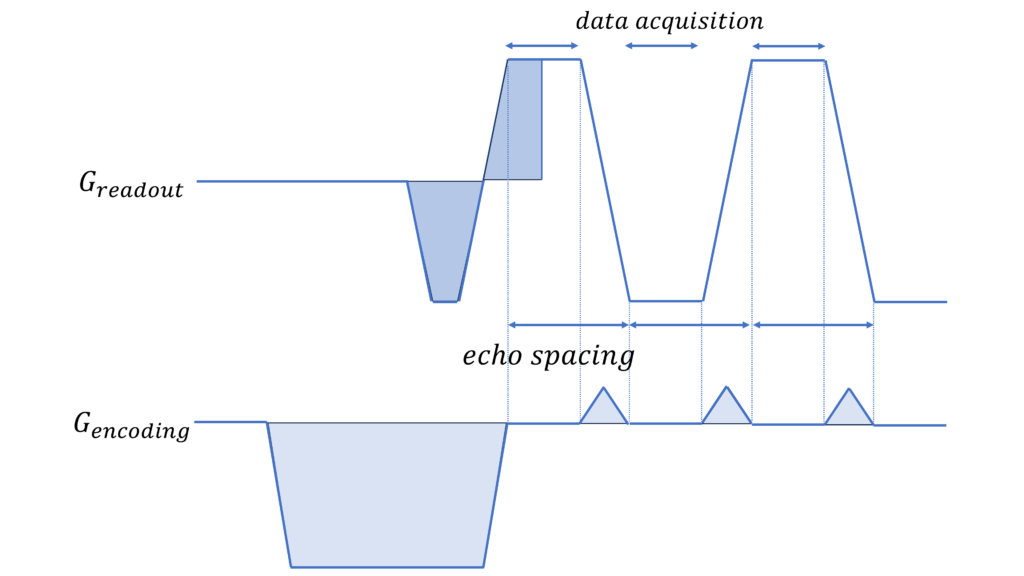
Fig.7-3に,Fig.7-1に示したEPIシーケンスのソースコードを示す.以下,そのソースコードを解説する.
1行目から37行目までは,これまでの,二次元グラジエントエコー法や二次元スピンエコー法と同様である.EPI特有のBlock()は,39行目の'PhaseEncoding'のブロックで,このブロックでは,Fig.7-2に示したリードアウトグラジエントの負の部分と反転して正になった部分と,エンコードグラジエントの負のグラジエントが定義されている.
45行目のBlock()では,AD()のみが定義されている.48行目のBlock()では,リードアウトグラジエントの反転と,位相エンコードグラジエントが定義されている.そして,53行目のBlock()では,リードアウトグラジエントの最後の部分が定義されている.
56行目のMain()では,Excitation Block()の次に,TEまでの時間を確保するWaitUntil()が記述され,その後に,PhaseEncoding Block()が記述されている.その後のループで,Readout Block()と,Reverse Block()が,echo_train_length-1回繰り返されている.そして,このループの後に,最後のデータ収集と,リードアウトグラジエントの最後の部分が記述されている.
Fig.7-4に,このパルスシーケンスでBloch simulationを行った結果を示す.
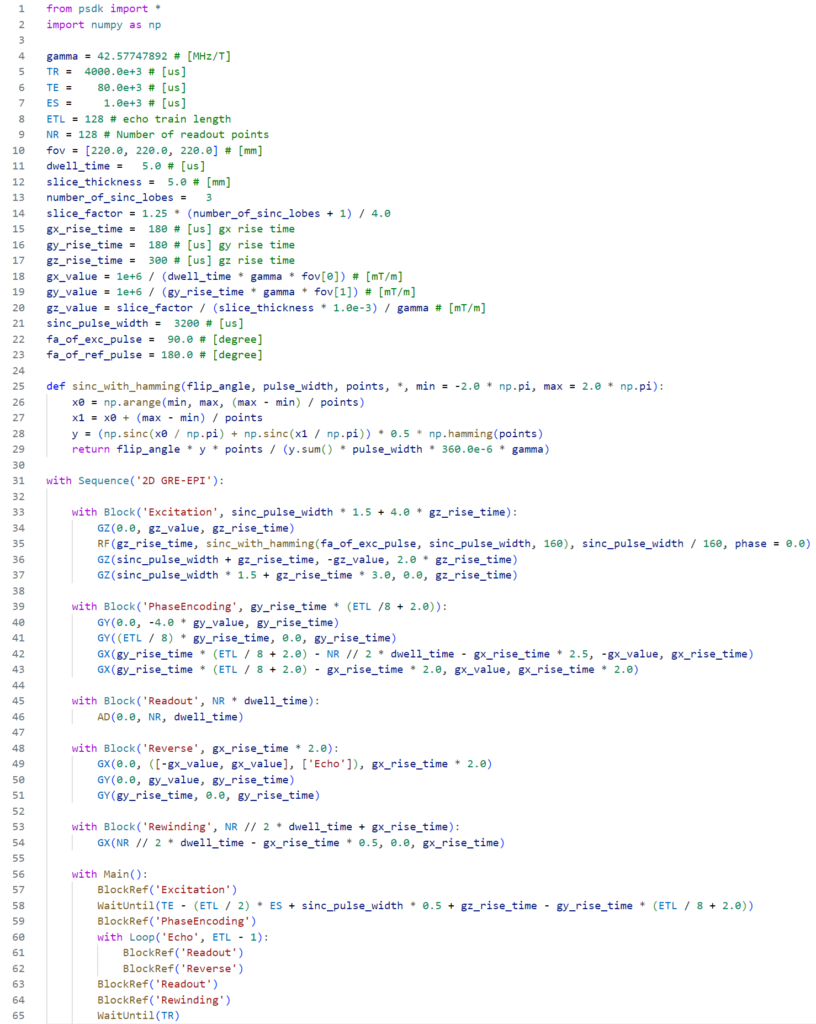
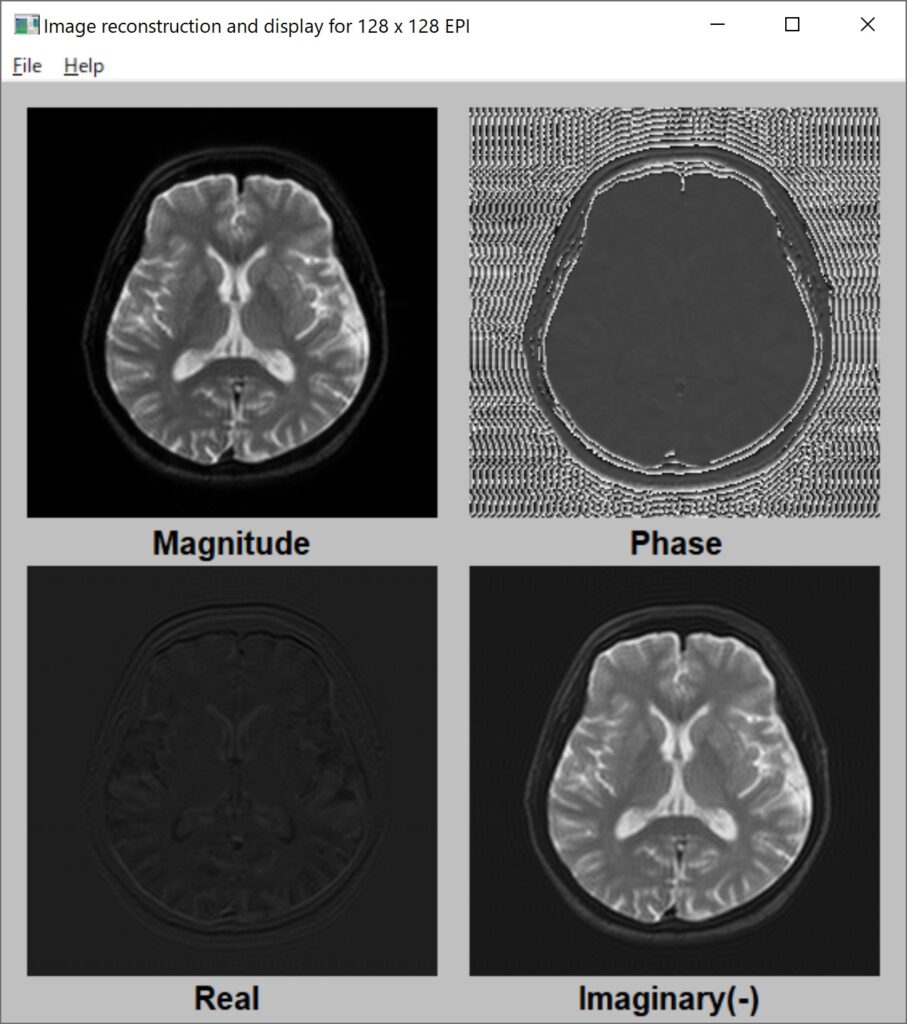
Fig.7-5には,ETLが128のときの,スピンエコーEPIのシーケンスチャートを示す.このように,スピンエコーEPIのシーケンスは,グラジエントエコーEPIのシーケンスにおける励起RFパルスを,リフォーカスパルスに入れ替え,そのTE/2前に,90°励起パルスを加えたものとなっている.また,Fig.7-6に,そのソースコードを示す.
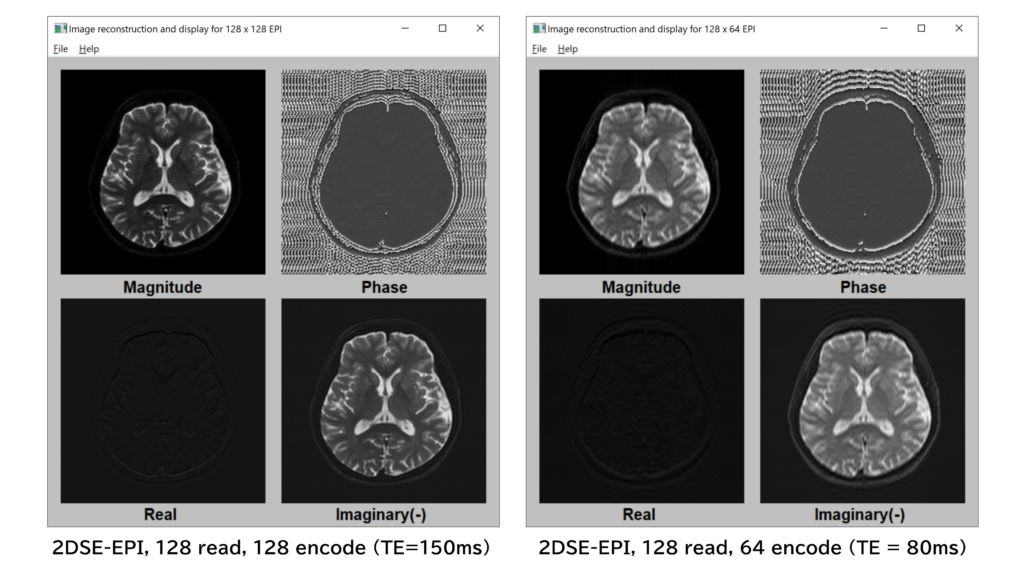
データ収集期間の全体の長さが128msとなっているため,最小のエコータイムは140ms程度(この条件では,正確には142.08ms)となる.よって,このシーケンスではTE=150msとしている.
150ms程度のエコータイムでは,生体組織の信号の減衰が大きいため,スピンエコー型のEPIでは,ETLを少なくしても,パラレルイメージングを用いて,位相エンコード数を増やす(通常は2倍)手法が,広く使われている.Fig.7-7には,ETL=64,TE=80msのパルスシーケンスチャートを示す.
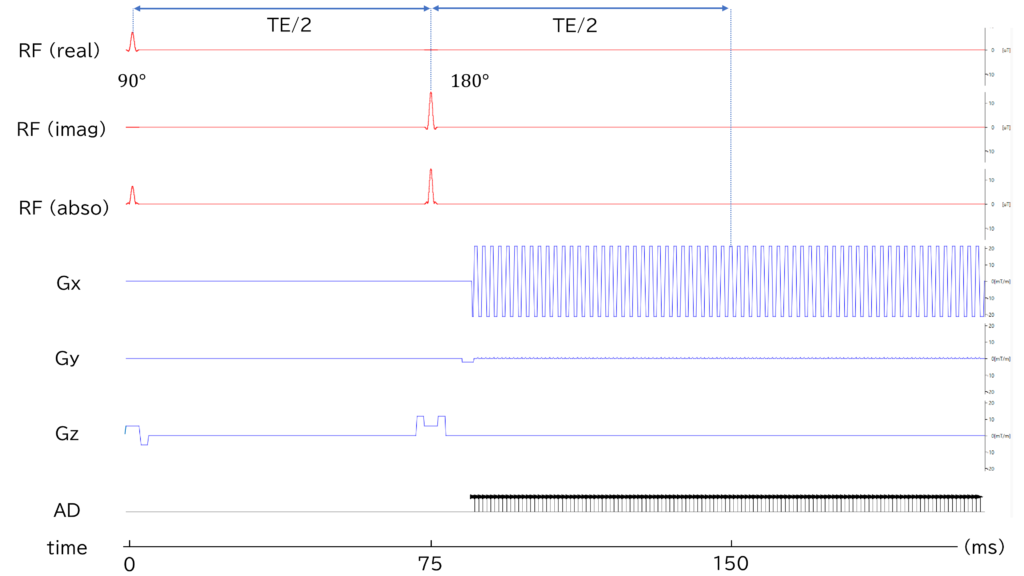
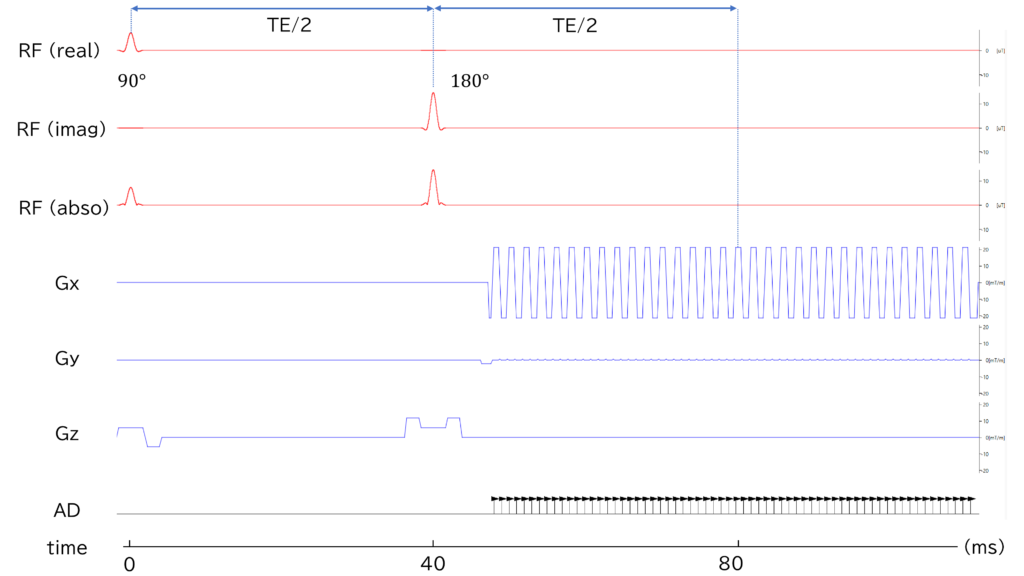
Fig.7-8には,それぞれ,Fig.7-5とFig.7-7のシーケンスでBloch simulationを行った結果を示す.Fig.7-7のシーケンスで,位相エンコード方向の分解能を向上させるためには,パラレルイメージングの手法が必要である.